


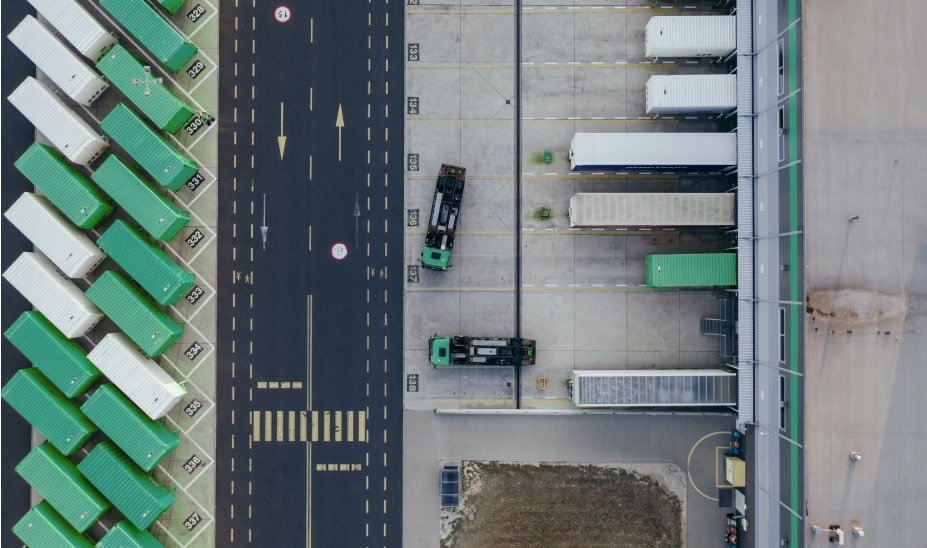
Improve productivity, safety and sustainability with logistics automation solutions for moving cargo in container terminals, manufacturing facilities and distribution centers.








The human-assisted autonomy approach enables one single operator to oversee multiple driverless vehicles simultaneously, which leads to increased productivity compared to manual operations. This approach optimizes resource allocation and drives operational savings.


Fatalities and incidents are a thing of the past – just like sweating in the cabin during the summer and freezing during the winter. Designed with the highest EU safety standards, FERNRIDE's system combines autonomous driving technology for routine tasks with remote operation for added reliability. The autonomy executes standard operations, while trained operators, working from the comfort and safety of a control center, are available to assist with complex maneuvers and handle unplanned edge cases.


Transition to emission-free yard operations enables your organization to make significant strides towards meeting its ESG goals. By reducing fuel consumption and gradually incorporate zero-emission trucks into your fleet, you can lower your carbon footprint, and total cost of ownership over time through reduced fuel expenses.


Enhance container movement efficiency and safety in mixed-traffic terminals with FERNRIDE-enabled autonomous terminal tractors.
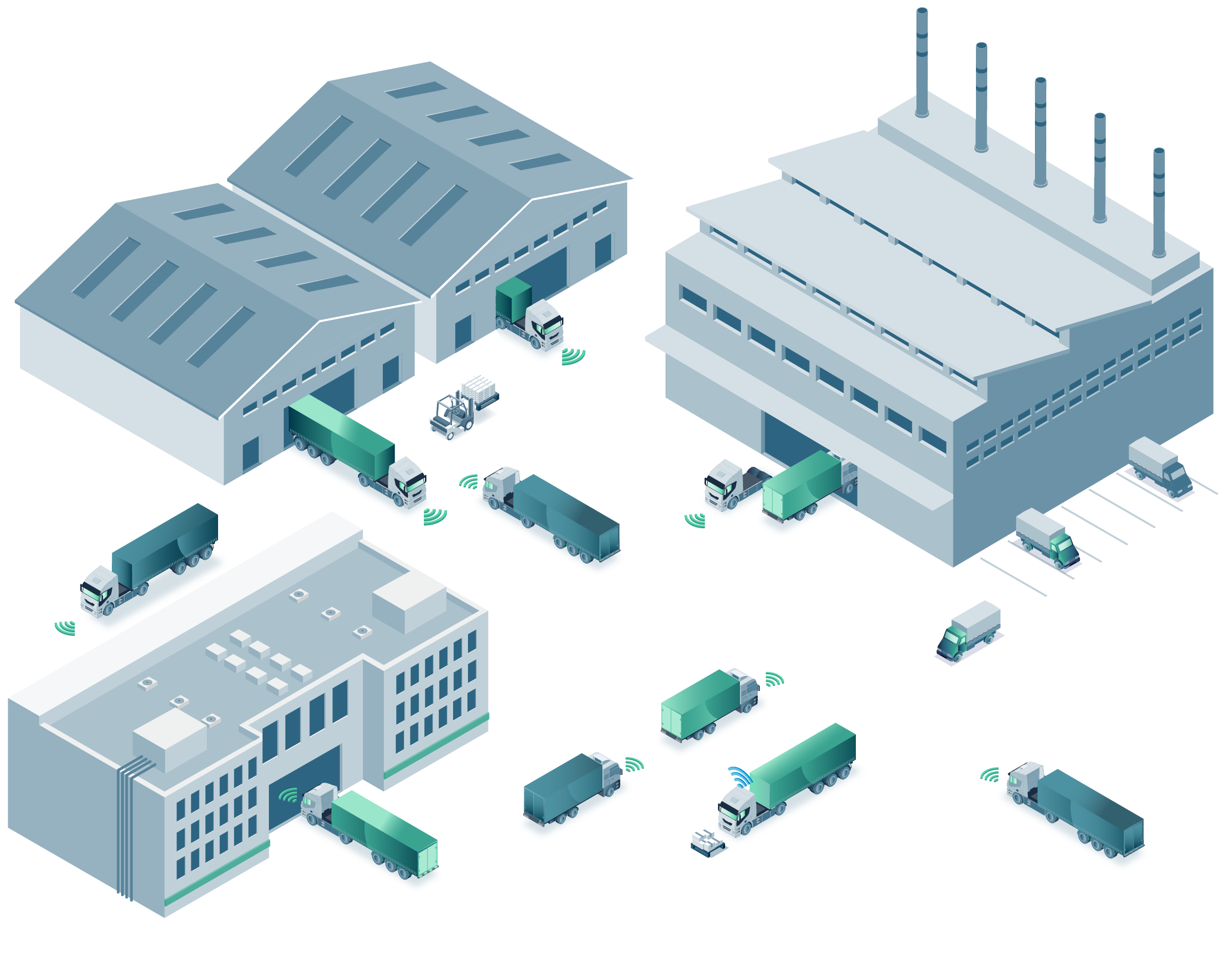
Streamline component transportation within your manufacturing facility using FERNRIDE's autonomous solution, reducing idle time and increasing efficiency.
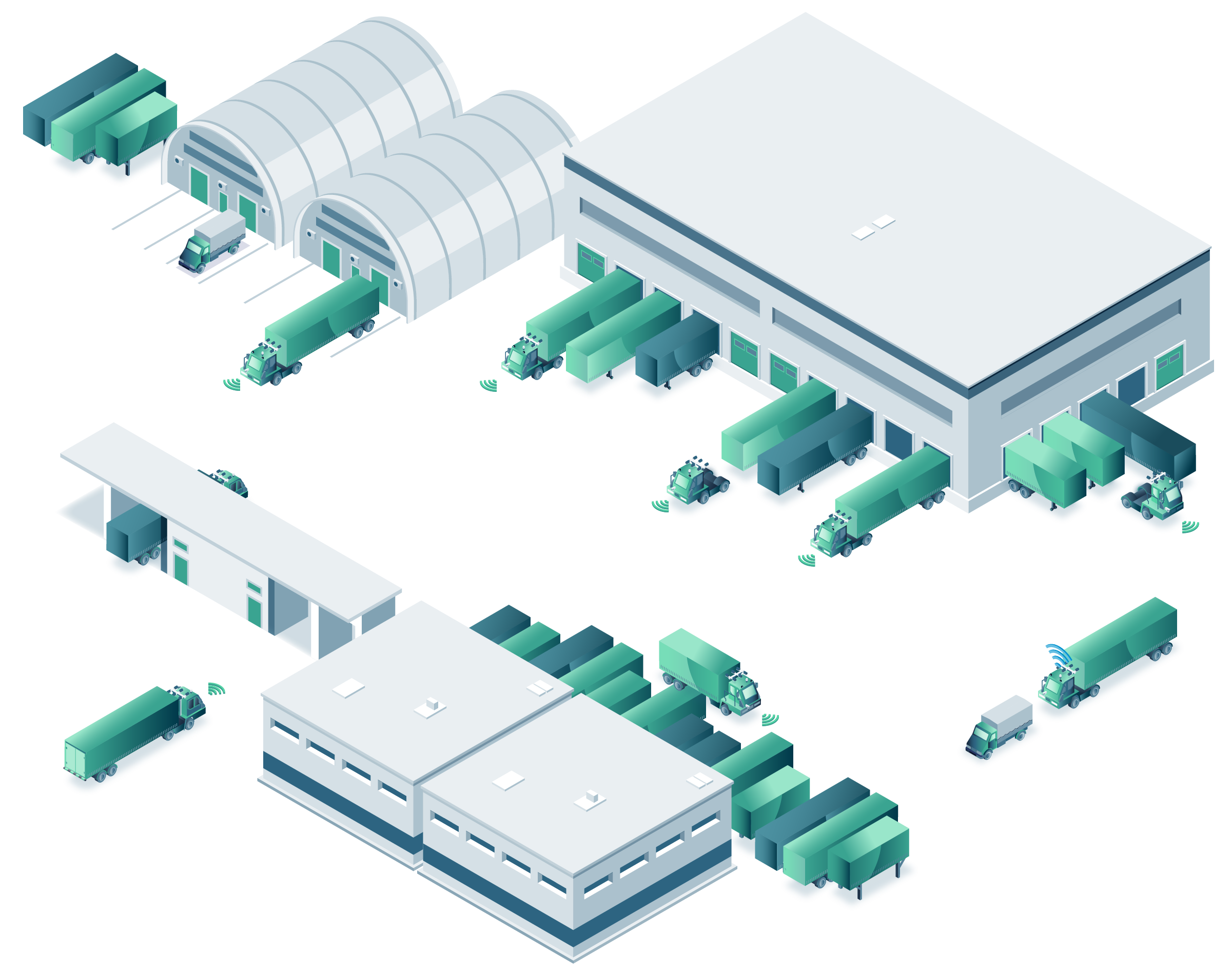
Automate your yard operations with FERNRIDE's reliable, autonomous shunting solution, improving productivity and reducing inefficiencies.







Contact us to learn how FERNRIDE's autonomous solution can accelerate your transition to automated and green operations. Our technology integrates with your existing processes, improving productivity, safety, and sustainability while delivering immediate ROI.


